
Most consumer reviews of the Roborock S8 Pro Ultra obsess over Pascal (Pa) ratings or the decibel levels of the auto-empty dock. This is a fundamental misunderstanding of the hardware. You are not buying a vacuum cleaner; you are purchasing a Level 2 autonomous vehicle for your living room.
If a robot has 6,000Pa of suction but cannot localize itself within a complex floor plan, it is functionally useless. The engineering marvel of the S8 isn’t how it cleans, but how it thinks.
We are tearing down the navigation stack—specifically the shift from simple optical inputs to a complex sensor fusion model utilizing dToF LiDAR and SLAM algorithms—to understand how this machine mitigates odometry drift and navigates absolute darkness.
The Eye: LDS LiDAR & dToF Mechanics
The turret mounted on the dorsal side of the S8 is not a camera; it is a Laser Distance Sensor (LDS). Unlike the vSLAM (Visual SLAM) used by iRobot, which relies on contrasting edges and light, Roborock utilizes dToF (Direct Time of Flight).
The physics here are identical to surveying equipment. The turret spins at approximately 300 RPM. Inside, a laser diode emits a pulse of light. The system measures the precise time ($\Delta t$) it takes for the photon to bounce off your sofa and return to the receiver.
$$Distance = \frac{Speed of Light \times \Delta t}{2}$$
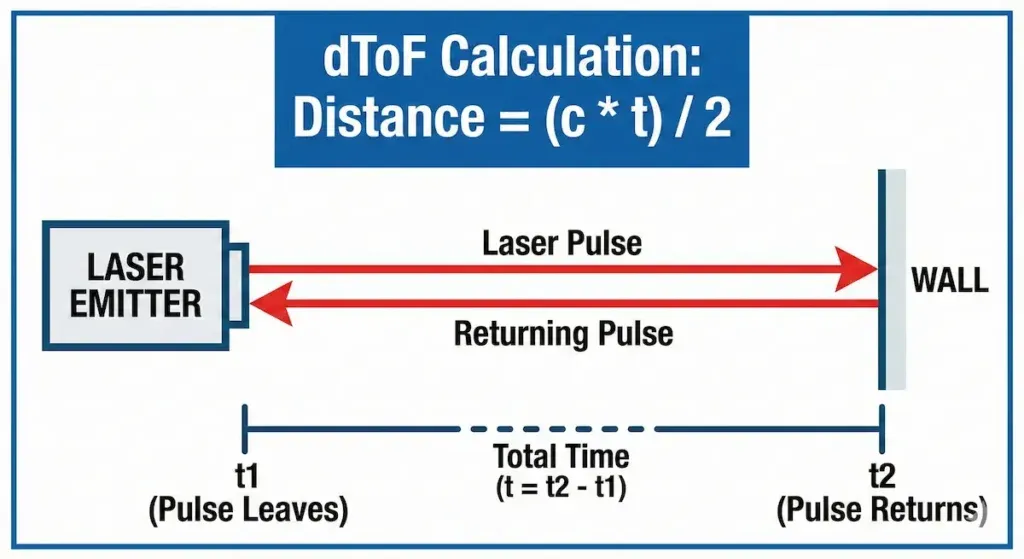
Figure 1: The Physics of dToF. Unlike camera-based vSLAM, the S8 measures the precise time-of-flight ($\Delta t$) of photons. This ensures consistent accuracy regardless of lighting conditions.
This process generates a Point Cloud —a sparse set of data points in a coordinate system. To the S8, your home is not an image; it is a collection of X,Y,Z coordinates. The advantage of dToF over triangulation (used in older models) is consistency at range; the error margin remains static regardless of how far the wall is, whereas triangulation accuracy degrades with distance.
The Brain: SLAM Algorithm & Sensor Fusion
Generating a point cloud is easy. Knowing where you are inside that cloud is the “Holy Grail” of robotics: Simultaneous Localization and Mapping (SLAM).
Here is the engineering problem:
-
Mapping: To build a map, the robot needs to know its precise location (Pose).
-
Localization: To know its precise location, the robot needs a map.
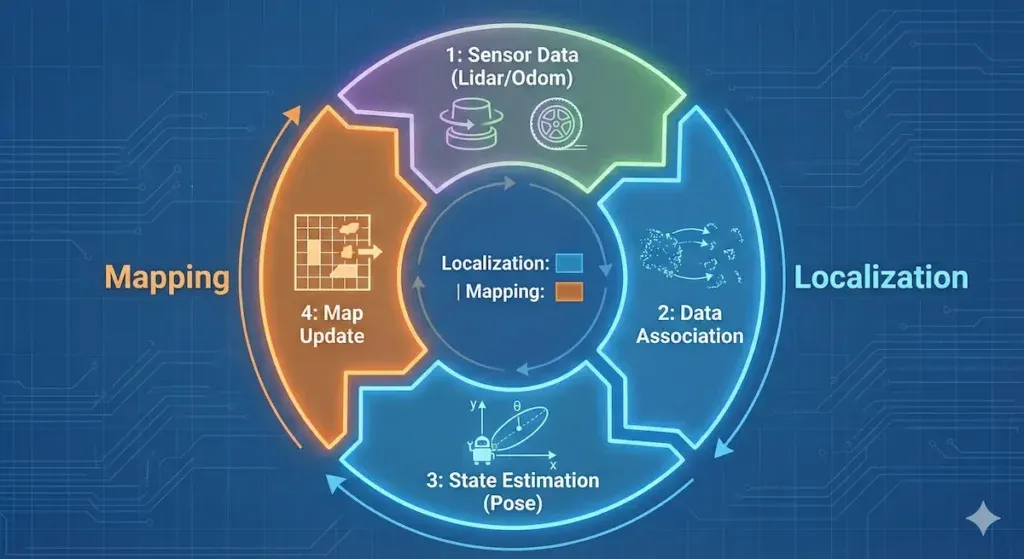
Figure 2: The SLAM Loop. The robot solves the “Chicken and Egg” problem by continuously cycling between localization (Where am I?) and mapping (What does the room look like?).
The S8 solves this “chicken and egg” problem through probabilistic algorithms (likely a variation of GraphSLAM or Particle Filters). It estimates its position, observes landmarks (legs of a table, corners of a wall), and updates the probability of its location.
The Role of Sensor Fusion
However, LiDAR is not infallible. If the robot enters a featureless hallway, or if the wheels slip on a high-pile rug, the Odometry fails. The wheel encoders might report that the robot moved 1 meter forward, but in reality, the wheels spun in place.
This is where Sensor Fusion becomes critical. The S8 fuses data from:
-
LDS LiDAR (Absolute positioning)
-
Wheel Encoders (Relative positioning)
-
IMU/Gyroscope (Angular velocity and acceleration)
By feeding these disparate data streams into a Kalman Filter, the S8 corrects “Odometry Drift.” If the wheels spin but the IMU detects zero acceleration and the LiDAR sees the wall hasn’t moved, the algorithm rejects the wheel data. This is the difference between a robot that cleans in straight lines and one that wanders diagonally.
Obstacle Avoidance: Structured Light vs. RGB
In the previous generation (S7 MaxV), Roborock used an RGB camera. For the S8, they shifted to Reactive 3D, a Structured Light system.
Why the downgrade from a camera?
It isn’t a downgrade; it’s a specific engineering choice for reliability and privacy.
-
Privacy: No video feed means no potential for hacked streams of your bedroom.
-
Low Light Performance: RGB cameras rely on ambient light (lux). If you run a camera-based robot at 2:00 AM, it is blind.
Structured Light works by projecting a known pattern (usually an IR grid) onto the scene. When that grid hits an object—like a shoe or a pet waste accident—the pattern distorts. The receiver calculates the depth based on the deformation of the grid. This allows the S8 to distinguish a flat surface (consistent pattern) from a 3D obstacle (pattern deformation) in zero-lux conditions.
It effectively separates the navigation layer (LiDAR) from the collision layer (Structured Light).
It is important to note the limitation of this technology. While the S8 uses IR patterns to detect static objects, it lacks the ability to detect ‘live’ presence or micro-movements. This contrasts with stationary sensors that utilize 60GHz radar, a technology we detailed in our Teardown: Aqara FP2 mmWave Sensor and the Engineering Behind True Presence. However, for a moving robot, the optical precision of Structured Light still beats the noise levels of mmWave radar.
Data Sovereignty and The Edge
For those of us building local smart homes using Zigbee hubs or Matter-over-Thread networks, cloud dependency is a concern.
The S8 performs SLAM calculations locally on its onboard NPU to reduce latency. We are seeing this shift towards ‘Edge AI’ across the industry, similar to the on-device facial recognition architecture we analyzed in Privacy at the Edge: An Engineering Analysis of the Aqara G4. Minimizing cloud transmission is the only way to guarantee low latency.
However, a critical flaw remains. While calculation is local, map storage and path planning optimization often ping the cloud (typically AWS servers). For enthusiasts building a fully offline ecosystem using dedicated Matter controllers like the X-Ray Vision: An Engineer’s Analysis of Aqara Hub M3, the S8’s reliance on AWS for map storage is a significant architectural vulnerability. Unlike Zigbee or Thread devices, this robot cannot function intelligently without an internet umbilical cord.
For absolute privacy, firewalling the device and using valid local control integrations (like Valetudo, if rootable) remains the only way to ensure zero-egress data, though this is becoming increasingly difficult with newer firmware locks.
The Verdict
The Roborock S8 Pro Ultra is a masterclass in Sensor Fusion. It demonstrates that in robotics, hardware specs (suction power) are secondary to software architecture (SLAM reliability).
Who is this for?
-
Engineers & Enthusiasts: If you understand the difference between a gyroscope and an accelerometer, you will appreciate the navigation logic.
-
Complex Layouts: Homes with dark rooms, mirrors, and varying floor types that confuse simpler optical-flow robots.
Who should avoid it?
-
Small, Simple Apartments: If you have a 500 sq ft studio, LiDAR is over-engineering. A cheaper inertial-navigation bot will suffice.
-
Privacy Absolutists: Unless you are willing to void warranties and attempt root access, your map data is going to the cloud.